Overview
The R.ALFRED (Robotic system for Advanced Long Bone Fracture Reduction) enhances surgical precision and improves patient safety by ensuring optimal fracture reduction with minimal tissue damage.
Key Technologies
- Utilizes parallel structure for high precision
- Utilizes 2D X-ray imaging to reconstruct a 3D bone model for trajectory planning
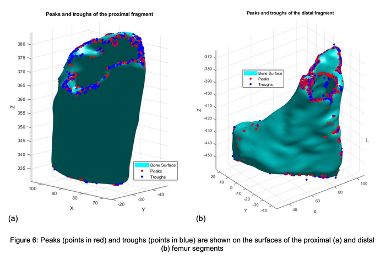
- The system identifies corresponding points on fractured segments
- Computes an optimal surgical trajectory that minimizes risk to surrounding tissues and bone
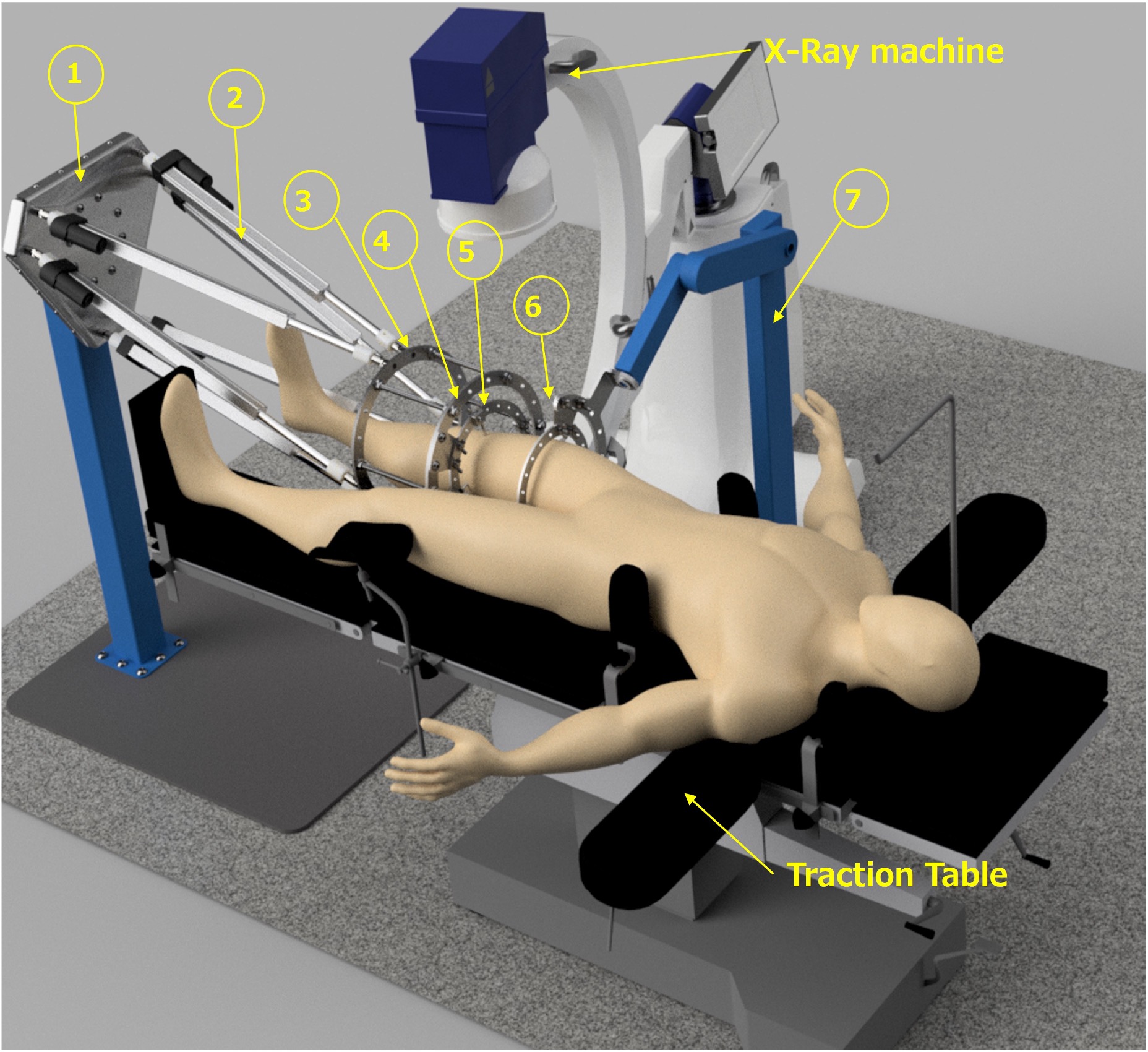
System Components
The R.ALFRED system consists of a robot base, six actuators, C-ring end-effectors, O-rings for distal and proximal femur fragments, and a perineal post. Developed at the Center of Excellence in Medical Robotics and Research (CEMRR).