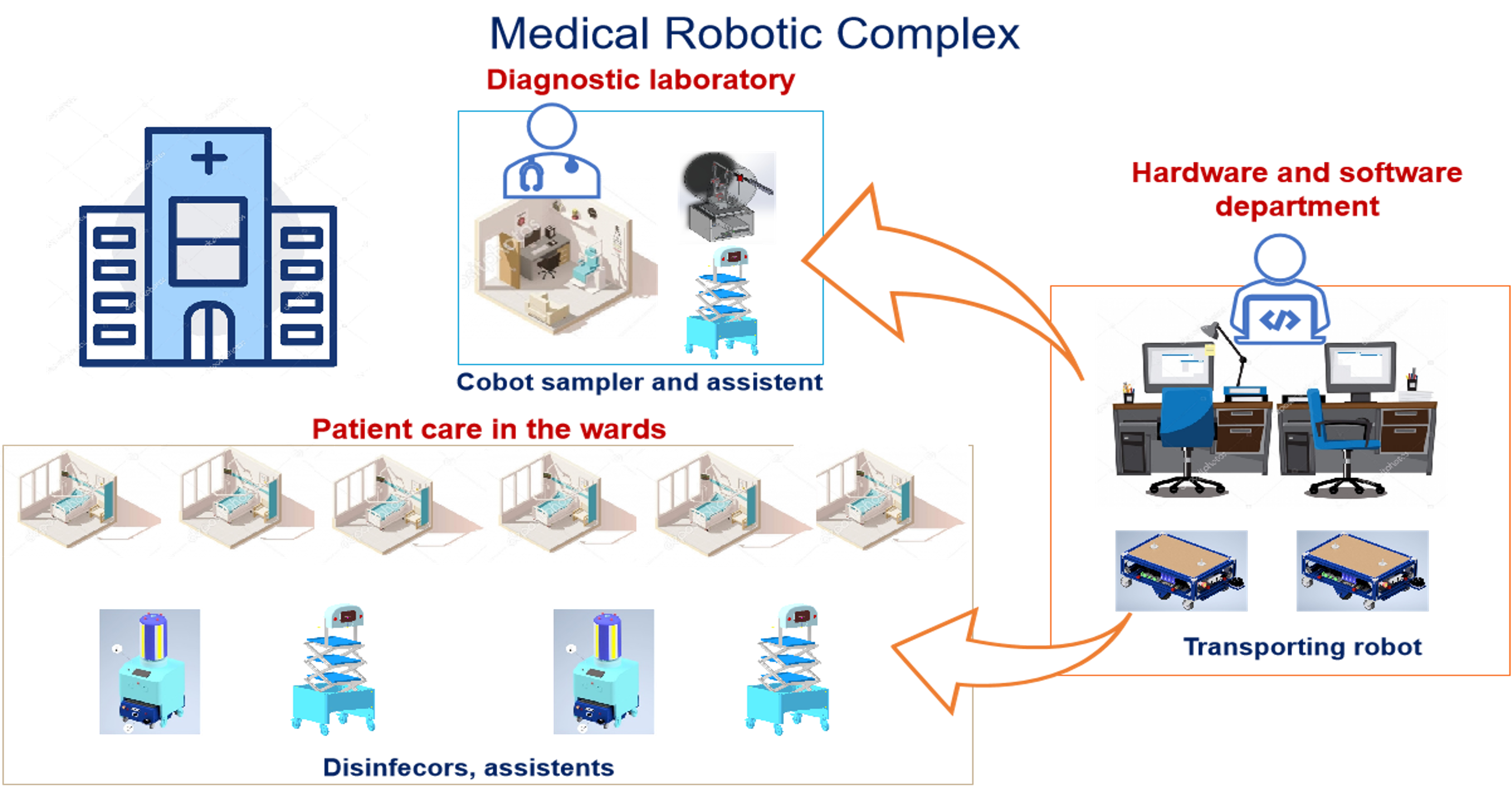
Overview
A robotic complex consisting of a saliva sampling parallel manipulator, patient care assistant, high-payload transporter, and autonomous disinfector with microreactor system. Co-invented a patent.
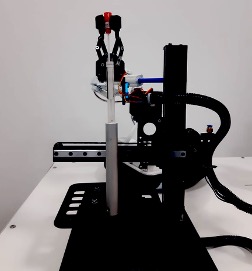
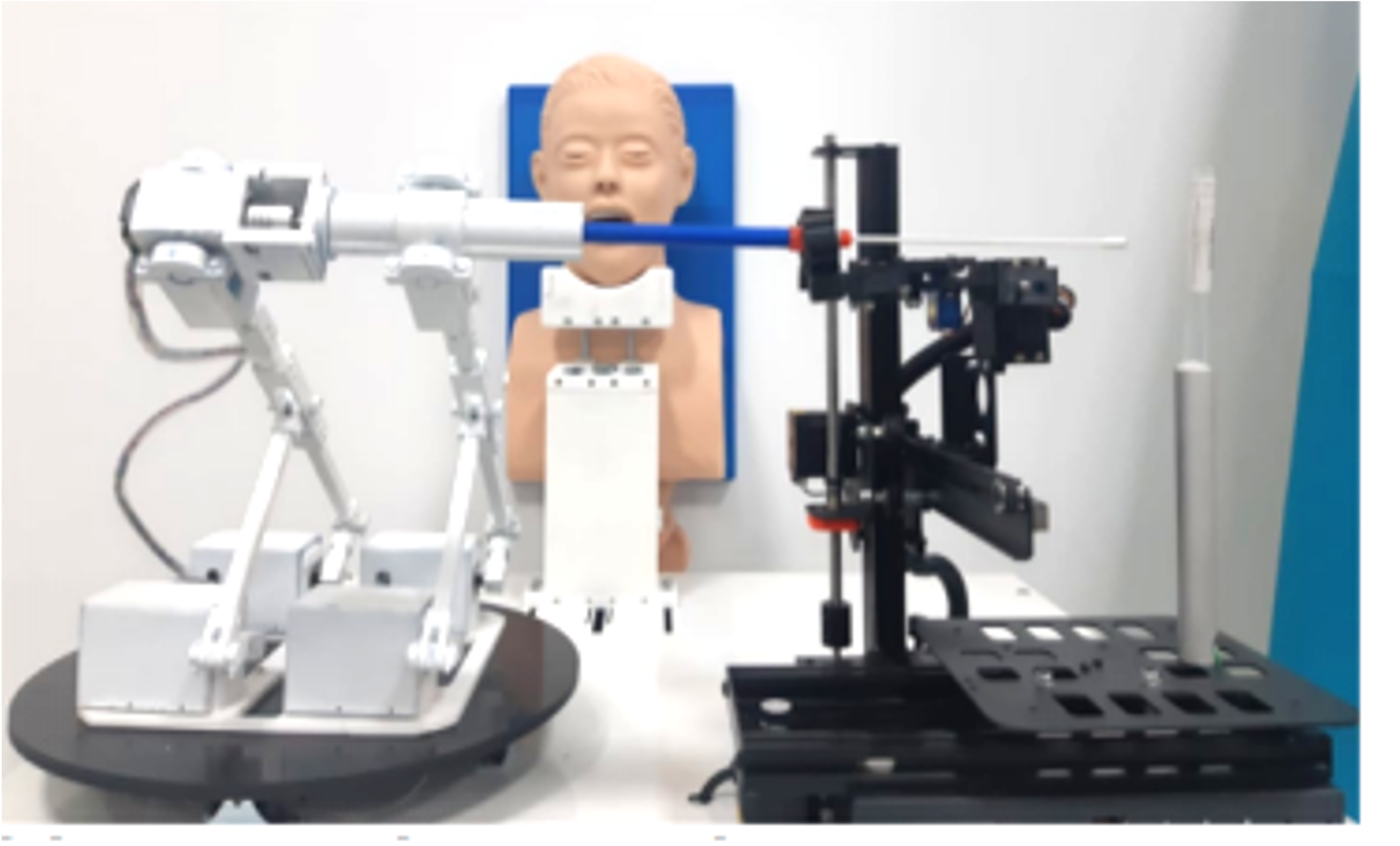
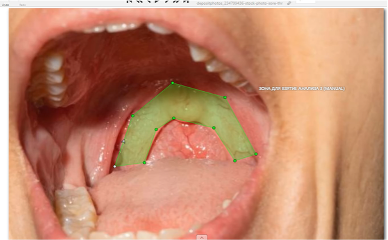
Saliva Sampler
Goal: safe, contactless collection of oropharyngeal swabs. Parallel design reduces power use by locating motors on a static base. High accuracy (0.0001 m linear, 1.8 degree angular positioning). Swab holder integration addresses limited range. Functional separation of manipulator links for end-effector positioning and swab operation.
Patient Care Assistant
Delivers food and medication to patients. Measures blood pressure, remotely assesses body temperature. Dialogues with patients in two languages (Kazakh and Russian). Voice communication connects patients with medical staff. Adjustable shelf heights for lying, sitting, or standing positions. Equipped with 3D face recognition. Motion accuracy of 0.0001 meters.
Transport Robot
Payload capacity 100 kg. Features a dual differential and four steering wheels for enhanced maneuverability. Autonomous navigation system with RRT path planning. LiDAR, depth camera, and ultrasonic rangefinders.
Autonomous Disinfector
Autonomous disinfection system with integrated microreactor for continuous sanitization of hospital environments.