
Overview
Development of synthesis methods and optimization of a walking robot's structural and metric parameters based on functional division of motors. Published 16 works including a patent, 7 international conference papers, 7 high-ranked (Q1, Q2) journal articles, and a PhD thesis.
Novelty
- Simplification of leg coordination and minimization of number of motors, lowering energy consumption
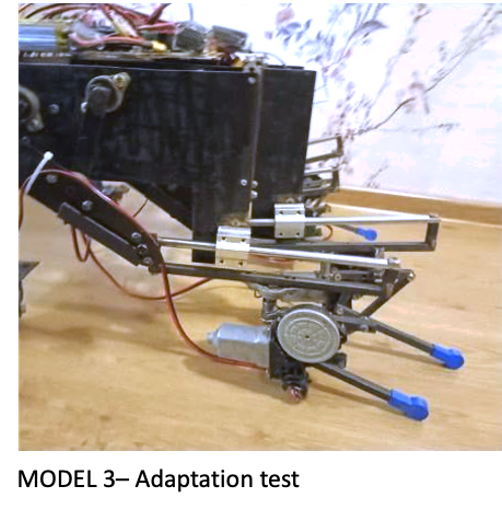
- Addressing the issue of adapting each foot to surface irregularities individually and independently of the main control unit
- Resolving the problem of redundant constraints in existing designs and eliminating parasitic loads on actuating mechanisms associated with multiple static indeterminacies
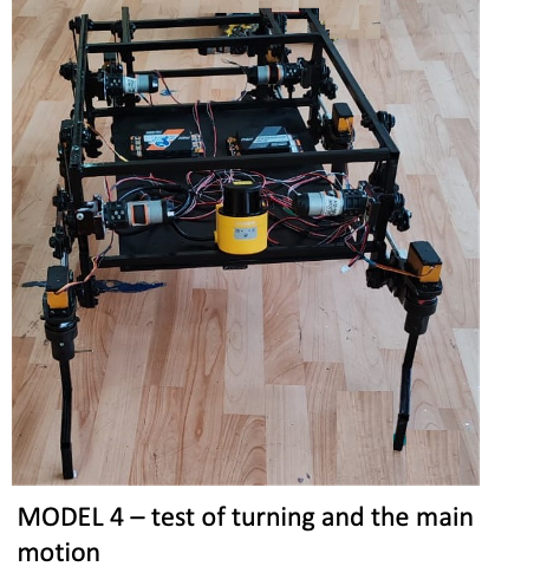
- Eliminating energy expenditures on foot slippage and reducing reaction forces at joints during turns
- Optimization of robot turning based on isotropy criterion
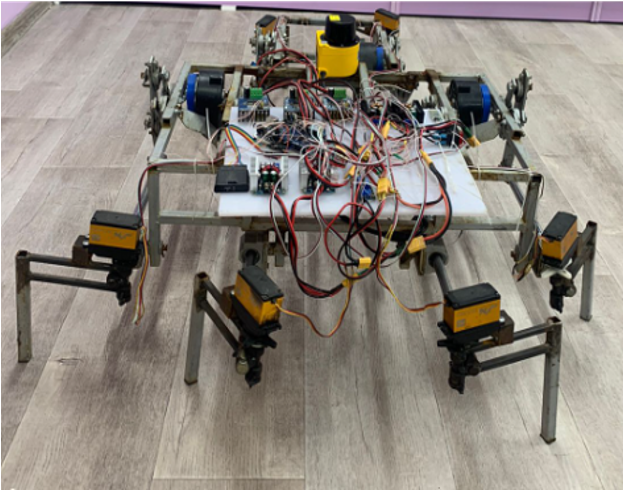
Results
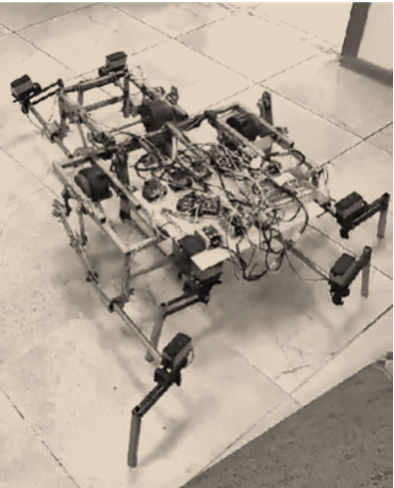
Achieved ~1mm trajectory accuracy, 92% improved force transfer, 52% greater stability over baseline. Autonomous navigation using LiDAR validated in Gazebo simulations and real-world environments. Several prototypes designed, 3D-printed, and tested.